Bluetooth®核心规范 6.0 版功能概览
1.导言Bluetooth® 核心规范 6.0 版包含多项功能增强。本文概述了每项增强功能。注:本文为市场推广文件,无意以任何方式取代或推翻Bluetooth® 核心规范。 每项功能增强都在一个专门的章节中进行描述,并首先介绍相关的背景信息。这样做的目的是让那些以前可能没有接触过Bluetooth 低能耗 (LE) 某些方面的读者更容易理解。尽管如此,背景部分并不完全全面,如果读者遇到不熟悉的术语或概念,建议下载并阅读Bluetooth LE Primer。 2.一瞥2.1Bluetooth® Channel SoundingBluetooth® Channel Sounding 实现两个Bluetooth 设备之间的安全精细测距。测距是指使用某些技术来测量一个物体到另一个物体的距离。 无线测距应用于多种产品,如数字钥匙解决方案和 "查找我的 "网络。新的Bluetooth Channel Sounding 功能旨在提供一种基于标准的技术方法,以满足此类产品通常具有的极具挑战性的精度和安全要求。 2.2 基于决策的广告过滤Bluetooth LE 扩展广告功能包括在主无线电信道和辅助无线电信道上传输一系列相关数据包。 基于决策的广告过滤允许扫描设备使用在主广告信道上接收到的数据包内容来决定是否在辅助信道上扫描相关数据包。这样可以减少在次级信道上扫描数据包的时间,从而提高扫描效率,因为这些数据包可能不包含与应用相关的 PDU。 2.3 监测广告商观察者设备的主机组件可指示Bluetooth LE 控制器过滤重复的广告数据包。当这种类型的过滤激活时,主机将只接收来自每个唯一设备的单个广告数据包(取决于核心规范在此上下文中对什么是唯一设备的定义)。这样做提高了主机的效率,但缺点是当情况决定观察者设备现在应尝试与其连接时,主机无法知道设备是否仍在范围内。这可能会导致观察者浪费能量,对先前发现的设备进行高占空比扫描,而该设备已不在范围内。 新的监控广告商功能使用主机控制器接口(HCI)事件,在相关设备进入或离开范围时通知主机。 2.4 ISOAL 的改进等时适配层(ISOAL)使较大的数据帧可以在较小的链路层数据包中传输,并确保接收器可以重组正确处理数据所需的相关定时信息。 ISOAL 可根据某些变量生成有帧或无帧PDU。如果生成的是有框 PDU,延迟会因此增加。 在Bluetooth 核心规范 6.0 版中,ISOAL 通过定义一种新的成帧模式得到了改进,该模式可减少对这一问题特别敏感的用例的延迟。该功能还提高了可靠性。 2.5 LL 扩展功能集设备可以交换各自支持的链路层功能信息。随着Bluetooth LE 的复杂性和多功能性不断提高,这一功能也得到了增强,以支持更多的功能。 2.6 帧空间更新Bluetooth 核心规范的先前版本为连接事件或连接等时流 (CIS) 子事件中相邻数据包传输之间的间隔时间定义了一个恒定值。该值在规范中被指定为T_IFS,固定值为 150 µs。 在 6.0 版核心规范中,用于连接或连接等时数据流的帧间距现在可以协商,可以短于或长于 150 微秒。 3.Bluetooth® Channel Sounding3.1 背景本节概述了Bluetooth LE 技术的各个方面,有助于更好地理解和欣赏Bluetooth® Channel Sounding 的新功能。 3.1.1 设备定位和Bluetooth LE自Bluetooth LE 首次在Bluetooth 核心规范中被指定以来,诸如 "到达角(AoA)"和 "离去角(AoD)"方向查找等核心功能以及 "查找我"(Find Me配置文件 )等大量相关配置文件已将Bluetooth LE 确立为一种流行的位置服务技术。
此外,在标准Bluetooth LE 广告数据包中传输的几种专有信标信息格式已被广泛采用。 许多应用需要计算两个Bluetooth 设备之间的距离。在Bluetooth 核心规范 6.0 版发布之前,这只能通过一种称为路径损耗计算的方法来实现。这种方法要求接收设备测量接收到的信号强度(称为RSSI),并知道远程设备在离发射器一定参考距离(如 1 米)处发射的信号强度。此外,相关物理学表明,接收器的信号强度与其与发射器距离的平方成反比。有了发射器的参考信号强度、RSSI 和这一简单的数学关系,就可以计算出距离值。
路径损耗计算适用于对距离计算精度要求不高、一致性和可靠性要求不高的情况。当两个设备之间的距离相对较小时,由于信号强度最初会迅速下降(见图 2),因此路径损耗计算可以获得相当好的结果。但在较远距离上,信号强度的微小变化可能会对应较大的距离范围,从而使计算对微小误差非常敏感。这种方法容易受到干扰和其他环境因素的影响。这种方法也不安全,会使应用面临距离欺骗等攻击风险。 资产跟踪、无钥匙进入和点火系统等应用的要求更具挑战性,需要采用更复杂、更安全和更标准化的方法,这样才能获得更准确、更可靠的结果。 3.1.2 数据传输架构Bluetooth 核心规范定义了多个概念,这些概念共同构成了Bluetooth 数据传输架构。这些概念包括物理传输、物理信道、物理链路、逻辑链路和逻辑传输。定义了用于支持不同应用类型的某些组合和配置,每种组合和配置都具有与拓扑、定时、可靠性、功率和信道使用等属性相关的特定特性。操作模式或运行模式有时被非正式地用来指各种数据传输架构配置。
图 3 显示了数据传输架构的一小部分,突出显示了两种最常用的逻辑传输及其相关的物理链路、物理信道和物理传输组件。这两种逻辑传输都与Bluetooth® Channel Sounding 有关。 3.1.2.1 LE-ACL LE-ACL 是最常用的Bluetooth LE 逻辑传输类型之一,可在两个设备之间提供面向连接的数据通信。事实上,ACL 连接通常被简称为连接。 请求连接的设备称为中心设备。接收并批准该请求的设备称为外设。 当两台设备建立 ACL 连接时,它们会商定一些管理其后续通信的定时参数。这些参数中最关键的是连接间隔。 连接间隔 参数以毫秒为单位定义了无线电为该连接提供服务的频率。 ACL 连接可以是加密的,在这种情况下,所有有效载荷都会在数据包传输前由链路层加密,并在对等设备的链路层接收时解密。 3.1.2.2 ADVB ADVB 是广告广播逻辑传输。它提供一种无连接通信模式,可用于同时向一个或多个设备传输数据,或指示外围设备的存在,以便其他设备发现它。 3.2 关于Bluetooth® Channel Sounding3.2.1 概述Bluetooth LE 的Bluetooth® Channel Sounding 功能包括两种不同的距离测量方法,可以单独使用,也可以结合使用。这两种方法分别称为相位测距法(PBR)和往返定时法(RTT)。 与路径损耗法相比,该系统支持更精确的距离测量计算,不易受干扰和环境因素的影响,并集成了多种安全机制。 本节介绍Bluetooth® Channel Sounding 。如需更深入、更全面的解释,请参阅相关论文Secure Fine Ranging withBluetooth Channel Sounding ,该论文可从 Bluetooth SIG 网站获取,https://www。bluetooth.com 。 3.2.2 技术要点3.2.2.1 系统结构 Bluetooth® Channel Sounding 是在 1:1 拓扑中两个连接设备之间进行的。希望计算自身到另一设备距离的设备称为发起方。另一台设备称为反射器。 在channel sounding 期间,启动器和反射器在预先约定的时间段内进行多次双向交流。 在Bluetooth 协议栈中,channel sounding 主要是Bluetooth 控制器的功能,而不是协议栈的主机部分。启动器控制器将底层测量数据传递到主机,并最终通过主机控制器接口(HCI)传递到应用层。应用程序有责任使用控制器提供的channel sounding 数据来计算距离测量值。
使用Bluetooth Channel Sounding 的设备可能包括天线阵列。这可以提供一系列不同的通信路径,减少多径传播的影响,从而提高距离测量的准确性。 3.2.2.2Bluetooth® Channel Sounding 和数据传输架构 图 5 描述了完整数据传输架构的一个子集,并显示了为支持channel sounding 而新增的物理链路和物理信道类型。
Channel sounding 是通过两个设备之间的 ACL 连接启动的。一旦channel sounding 启动,ACL 连接将继续作为链路层控制交换的传输,并为channel sounding 无线电活动调度提供定时参考。Channel sounding 使用新的Channel Sounding 物理链路和Channel Sounding 物理信道。 中心设备或外围设备可分别扮演启动器和反射器角色。 3.2.2.3 距离测量方法 3.2.2.3.1 基于相位的测距(PBR) PBR 方法利用了无线电信号的一个基本特性,即相位及其与频率和波长的关系。相位可视为波周期的一部分,通常用 0 至 2π 弧度之间的角度表示。相位的变化有时归因于相位旋转。
图 6 显示了与无线电信号中的点相对应的相位值示例。请注意这些值在多个波周期内的循环重复性质。 使用 PBR 时,启动器以给定频率f1向反射器发射信号。反射器向启动器发回信号,启动器在收到回复后,测量接收信号的相位,我们在此将其称为Pf1。
接着,发射器发射另一个无线电信号,这次频率不同,为f2。 反射器再次将接收到的信号回传给发射器。频率的改变会改变波长,因此发射器在接收到反射器回波时测量到的相位Pf2也会随之改变。 现在,启动器可以使用频率差(f1-f2)、相位差(Pf1-Pf2)和光速公式计算两个设备之间的距离。 在实际应用中,设备通常会以两个以上的不同频率交换两个以上的信号,因为有了更多的低电平测量值,就能提高应用计算距离测量值的精度。 启动器测量到的相位值会随着设备之间距离的增加而变化,但在某一点上会重置为零,相位值开始重复。这是因为相位旋转具有周期性,如图 6 所示。在距离测量中,这种现象被称为距离模糊,因为相同的相位值可能在多个不同的距离上出现。 究竟何时首次出现距离模糊,取决于channel sounding 信号频率之间的差值。这个差值被称为频率间隔。一般来说,频率间隔越大,距离模糊越早出现。Bluetooth 希尔思使用的频率间隔为 1 兆赫,距离模糊在 150 米左右才会出现。 将 PBR 与第二种距离测量方法 "往返计时 "结合使用,可以解决距离模糊的问题。 3.2.2.3.2 循环时序 (RTT) RTT 方法是发起者向反射者发送数据包,反射者再发回同样的数据包。只有在这一点上与 PBR 方法有相似之处。 为了能够计算距离测量值,启动程序在传输其数据包时会记录一个时间戳。这个时间称为 "出发时间 "或 "ToD"。在收到反射器的回复数据包时,它会再次记录一个时间戳,这个时间称为到达时间或 ToA。 如果我们把 ToD 和 ToA 之间的时间称为TA-D,那么用TA-D乘以光速 (c),再除以 2(因为这是双向往返时间),就可以得到传输距离的测量值。 不过,这只是对传输距离的粗略估计,因为它没有考虑到反射器接收数据包、处理数据包、做出响应和传输数据包所需的时间。这一处理过程所需的时间看似很短,无关紧要,但以光速(在真空中)传输的无线电波可以在一微秒内传播 300 米,因此在计算飞行时间时,很小的误差都会对计算出的距离产生很大影响。因此,准确确定无线电信号实际飞行的时间是使用 RTT 方法获得准确距离测量的关键。 Bluetooth Channel Sounding 中的 RTT 可确保知道反射器绕过接收到的 CS 数据包并将其发送回启动器所需的时间,因此可在计算中使用该时间值来得出更精确的飞行时间。 Bluetooth 核心规范定义了几种捕捉 ToA 和 ToD 时间戳的不同方法。所选方法的复杂程度和准确性各不相同。最精确的时间捕捉方法被称为分数定时估计。尽可能精确地捕捉 ToA 和 ToD 值将获得最精确的距离测量结果。 在channel sounding 开始之前,发起方和反射方必须建立加密 ACL 连接。该连接用于安全交换与channel sounding 初始化程序相关的链路层控制 PDU。 Bluetooth® Channel Sounding 有自己独特的安全功能。第一个要执行的channel sounding 程序是 CS 安全启动程序。该程序为两个设备配备初始化向量 (IV)、实例化非密钥 (IN) 和个性化向量 (PV) 值,这些值随后将在channel sounding 期间用作新安全功能确定性随机比特生成器 (DRBG) 的输入。DRBG 用于channel sounding 的许多安全功能(见 3.2.2.10 )。 3.2.2.10Bluetooth® Channel Sounding 安全性概述).加密 ACL 连接的安全性可保护重要数据的交换。 Bluetooth® Channel Sounding 功能为开发人员提供了一系列选项,用于控制或影响所使用的距离测量方法、测量精度、程序导致的延迟、安全性和其他变量。设备不一定具有完全相同的channel sounding 能力,CS 能力交换程序允许两个设备交换有关能力和偏好的信息。 交换功能数据后,设备参与 CS 配置程序,并就channel sounding 程序启动时的配置参数达成一致。 使用 PBR 方法时,反射器会以相同的频率回传从启动器接收到的信号。但是,所有设备生成信号的频率都会有一定程度的误差,即预期或想要的 频率与实际测量的生成信号频率不同。频率与波长直接相关,而 PBR 方法正是基于这种关系。因此,反射器回波信号频率的不准确性会影响距离测量的准确性。因此,设备制造商可能会为设备配备一个名为 "分数频率偏移执行误差 (FAE) 表 "的数据表,该表针对一组参考频率,提供了生成信号的频率与预期或请求频率之间的差值,以百万分率 (ppm) 表示。 使用模式-0[1]FAE 表请求程序,启动器可向反射器请求 FAE 表,并在进行计算时将该数据考虑在内。 完成初始化程序后,channel sounding 。这需要两个设备进行一系列不同类型的交换,以便进行测量,供应用程序用于距离计算。 3.2.2.5 时间划分 Channel sounding 涉及Channel Sounding 物理信道的使用,该信道来自一般的Bluetooth 数据传输架构(见3.2.2.2Channel Sounding 和数据传输架构)。这定义了射频活动如何细分和使用时间。 3.2.2.5.1 事件、子事件和步骤 Channel sounding 在一系列程序中进行。每个程序由若干事件组成,每个事件又分为若干子事件。在这种分级方案中,时间的最终细分是步骤。启动器和反射器之间的射频交换就是在步骤中进行的。
各种配置参数控制着这一结构的方方面面,包括不同级别元素之间关系的心 数(例如每个子事件的步骤数)、事件的持续时间以及在步骤中发生的活动。例如,子事件中总是至少有 2 个步骤,最多 160 个步骤。每个程序最多有 256 个步骤。 3.2.2.5.2 定时锚点 所有channel sounding 程序、事件、子事件和步骤的开始时间都直接或间接锚定到相关 LE ACL 连接中的选定连接事件,在该连接上执行链路层程序以启动channel sounding 。 3.2.2.6Bluetooth® Channel Sounding 步骤 3.2.2.6.1 数据包和音调 在 CS 步骤期间,设备交换一系列称为 CS 同步数据包的数据包,也可选择交换称为 CS 音调的音调。 CS 同步数据包可使用 LE 1M 或 LE 2M PHY 传输。GFSK[2]调制方案,与其他Bluetooth LE 数据包一样。 CS 音调是一种使用振幅偏移键控(ASK)来创建频率固定的符号的信号。 步骤有一个相关的模式,其编号为 0 至 3(含 3)。模式定义了步骤中交换的细节及其目的。
channel sounding 程序中使用哪种步骤模式取决于Bluetooth 核心规范中的规则和两台设备商定的配置。这包括使用哪种或哪几种距离测量方法,即 RTT 和/或 PBR。 3.2.2.6.2 模式组合和排序 Bluetooth Channel Sounding 在程序中,步进模式可以按不同模式组合和排序,应用层可以在配置过程中行使很大的控制权。应用层还可以配置要执行的channel sounding 程序的重复次数,以及影响数据包或音调交换数量和某些内容的其他变量。 在确定要建立的最佳配置时,应用将考虑距离测量的精度要求、延迟容忍度和安全需求等问题。例如,一般来说,更多的交换机将提供更多的测量,可能有助于提高精确度,但代价是延迟增加。 每个子事件总是涉及至少两种不同的步骤模式。模式-0 总是启动每个子事件,同一子事件中的其他步骤可以使用一种或两种其他模式,但必须符合Bluetooth 核心规范中列出的某些允许组合,表 1 重复了这些组合。
表 1 - 允许的非模式 0 模式组合。 表 1 还介绍了主模式(Main_Mode)和子模式(Sub_Mode)。这些术语与通过一些配置参数创建重复步进模式的方式有关。配置过程中,1-3 模式中的一种将被指定为主模式,另一种可选为子模式。 一般来说,步进模式排序遵循这种模式:
除子事件必须始终以一个或多个模式 0 步开始这一一般规则外,步进模式序列与子事件边界无关。完整序列可以跨越多个子事件。 3.2.2.7 射频通道 3.2.2.7.1 信道和信道过滤 channel sounding 中定义了 72 个信道,每个信道的宽度为 1 兆赫,信道索引值独一无二。这些信道的安排可确保避开 LE 一级广告信道。 信道宽度为 1 兆赫,而不是通常的 2 兆赫,这就确保了使用相邻信道的 PBR 信号之间的频率间隔在 150 米左右才会出现距离模糊。 一个名为 CS 信道图的特殊信道图指明了哪些信道应纳入信道选择,哪些应避免。链路层控制程序允许发起方和反射方根据本地射频条件对该表进行更新。 跳频是从标记为可用的信道中选择一个新信道。这通常发生在每一步执行之前,除非使用了称为 "主模式重复 "的模式排序功能。 3.2.2.7.2 信道选择 Channel Sounding 中定义了一套新的三通道选择算法(CSA)。它们统称为 CSA #3,单独称为 CSA #3a、CSA #3b 和 CSA #3c。 CSA #3a 仅用于选择在模式 0 步骤中使用的通道。 CSA #3b 和 CSA #3c 都设计用于非模式 0 步骤,但在channel sounding 程序实例中只能使用其中之一。 channel sounding 期间保留两个通道列表。第一个仅用于 CSA #3a 和模式 0 梯级的通道选择。第二个用于 CSA #3b 或 CSA #3c 的非模式-0 步骤。 CSA #3a 和 CSA #3b 的工作方式相同,但作用于不同的频道列表。它们使用相同的算法,对标记为包含的信道进行随机排序,以创建一个洗牌信道列表。洗牌频道列表中的每个条目都是唯一的,只能使用一次。当洗牌频道列表中的所有条目都被使用过之后,它就会重新生成,创建一个新的随机频道列表。 CSA #3c 算法与 CSA #3b 算法有很大不同。信道图中包含的信道子集被组织成组,并在组内生成形成形状的信道模式。CSA #3c 在某些情况下可能会在检测反射信号路径方面提供一些优势。详情请查阅Bluetooth 核心规范。 CSA #3c 支持是可选的。 3.2.2.8 LE 2M 2BT PHY Bluetooth LE 的物理层包括几种被称为 PHY 的允许配置的定义。PHY 的定义包括所使用的调制方案及其参数,如符号率、最小频率偏差和带宽-比特周期积(BT)。 在Bluetooth 核心规范 6.0 版之前,有三种已定义的 PHY。它们的名称分别是 LE 1M、LE 2M 和 LE Coded。LE 编码 PHY 与 LE 1M 完全相同,只是数据包需要进行额外的编码,以实现错误检测和纠正。 6.0 版中引入了名为 LE 2M 2BT 的新物理层配置。这种新的物理层配置只能与Bluetooth® Channel Sounding 一起使用。 四种 PHY 的比较见表 2。 </</
最新评论
|





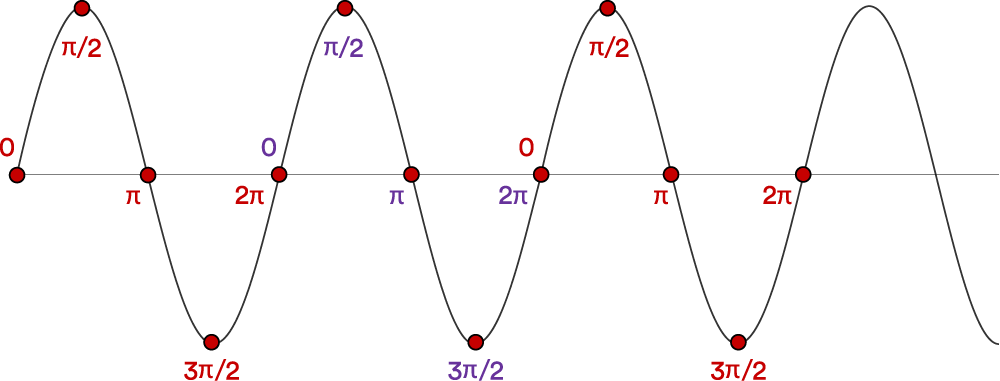
 图 7 - 启动程序发送channel sounding 信号,反射程序发出回声
图 7 - 启动程序发送channel sounding 信号,反射程序发出回声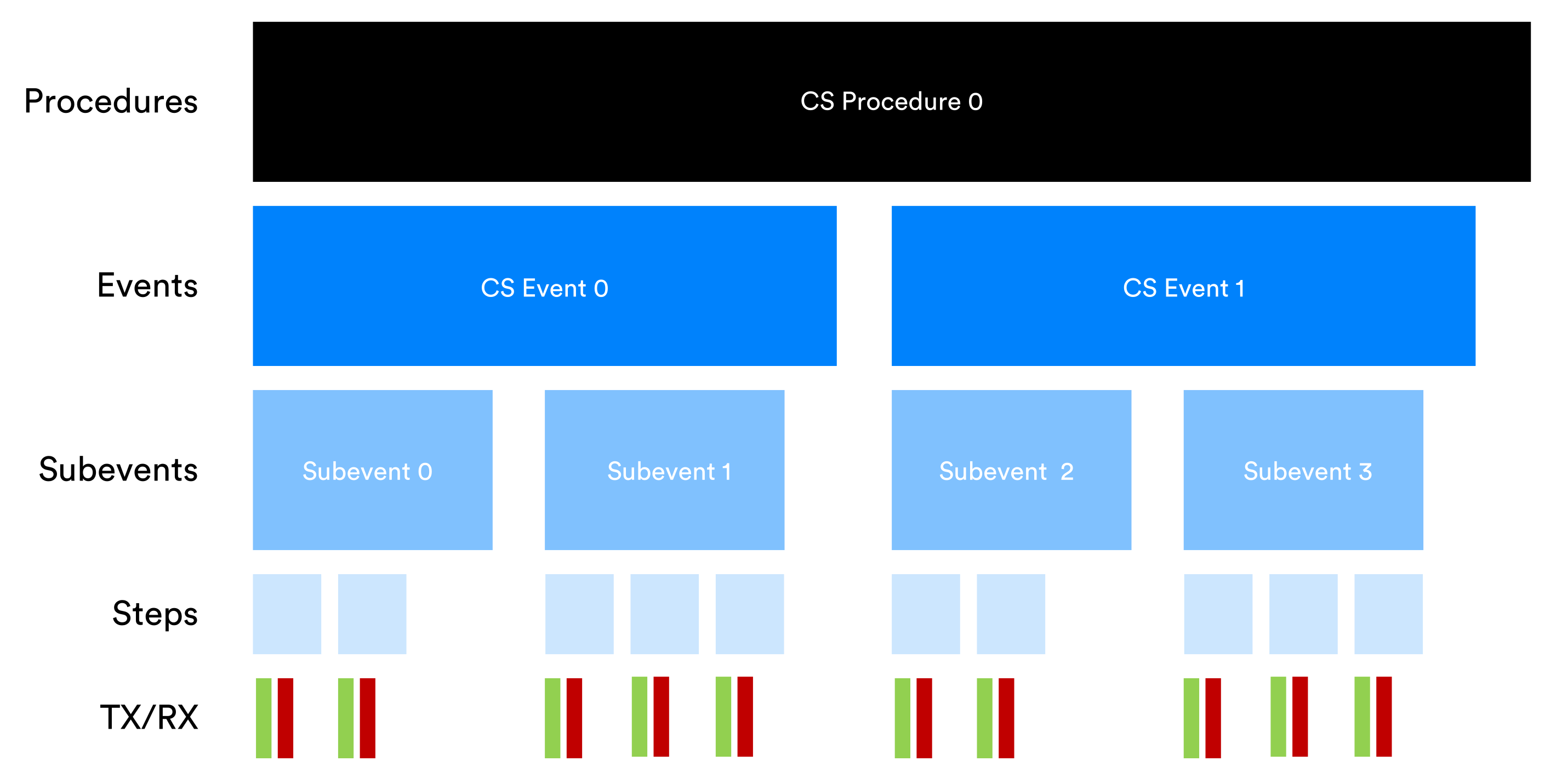 图 8 -Channel Sounding 示例配置中的程序结构
图 8 -Channel Sounding 示例配置中的程序结构




